全息圈
VR AR MR前沿
 quanxiquan.cn
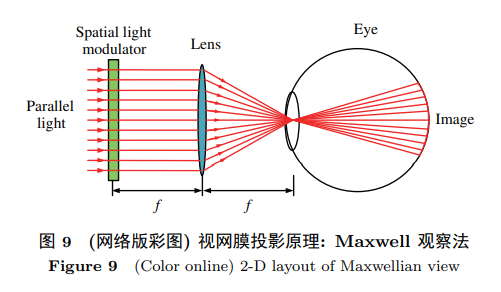
quanxiquan.cn普通的頭盔顯示系統, 無論其采用怎樣的結構形式, 其實質上都是一個目鏡系統, 將顯示器生成的圖像變成放大、拉遠的虛像, 再借由人眼聚焦在視網膜上. 如果將人眼也視為系統的組成部分, 則顯示器面和人眼視網膜面是共軛的物像面, 通常要獲得更大的視場角則需要更大口徑、更復雜的系統. 而視網膜投影顯示 (retinal projection display, RPD) 打破了這種物像關系, 它采用 Maxwell 觀察法, 使用空間光調制器在光束的不同孔徑高 (h)、不同方位角 (θ) 的位置疊加圖像信息, 讓用戶眼底的每一點對應于從空間光調制器出射的特定孔徑高、特定方位角的光線. 簡化的視網膜頭盔原理圖如圖 9 所示.在這種對應關系下, 擴大系統視場角變化成為擴大光束的孔徑, 也即對應于增大匯聚透鏡的數值孔徑.從光學設計角度, 由于匯聚透鏡只有零度這唯一的視場角, 采用非球面可以獲得大數值孔徑. Ando 在其提出采用全息光學元件的頭盔顯示器中首先用到了 Maxwell 觀察法原理 [21].
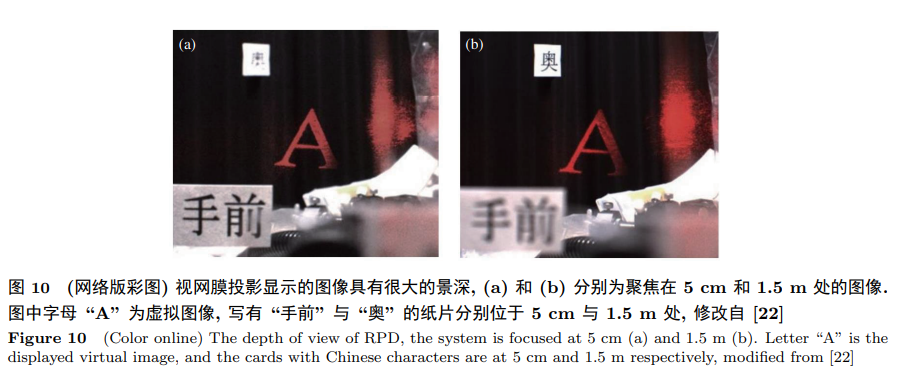
另一方面, 這個系統可以看作具有無窮小出瞳直徑的小孔成像模型. 我們知道對于理想的小孔成像系統, 景深為無限大并且改變像面的位置或者傾斜角度并不會對成像的清晰度產生顯著影響, 而只是引起放大率和畸變的變化. 同樣地, 視網膜投影顯示的圖像沒有遠近的概念, 在人眼視度調節的過程中圖像始終是清晰的, 而在實際中, 由于系統并不是理想的針孔模型, 系統的景深是有限的. 視網膜顯示系統的主要優勢在于可以提供更清晰的圖像、更高的對比度和更大的景深, 如圖 10 所示 [22].
視網膜投影成像與視網膜掃描顯示 (retinal scanning display, RSD) 是密不可分的, 如果認為視網膜掃描光束的口徑足夠細, 則可以將后者看作通過時序方式實現了視網膜投影. 兩者之間的另一個差別在于, 對于視網膜掃描系統而言, 由于掃描是逐點顯示的過程, 可以通過快速調焦來使得每個視場點具有不同的眼底離焦量, 這個離焦量的不同也就對應于顯示畫面的不同深度. 常見的方法是采用變形鏡的方式. von Waldkirch 等 [23, 24] 研究了部分偏振光照明的視網膜掃描顯示系統, 并提出用快速調焦的液體透鏡進一步擴大視網膜投影系統景深的方法. 2003 年 McQuaide 等 [25] 利用帶有變形鏡的單眼視網膜掃描顯示頭盔實現 33 cm 到無限遠的顯示深度. Schowengerdt 等 [26] 將其擴展為雙目系統, 實現了會聚與聚焦可以分別調制的立體頭盔顯示系統. Kim 等 [27] 將視網膜投影與掃描顯示相結合, 由于人眼的視覺暫留作用, 用戶觀察到的是無數個 Maxwell 觀察合成的效果, 從而生成了具有真實深度感的顯示效果. 2014 年, Takahashi 等 [28] 利用衍射光學元件, 通過構建多個視點的方式實現了具有真實立體感的視網膜投影. 目前已經投入市場的視網膜投影顯示設備與視網膜掃描顯示設備主要有 MicroVision 公司的 NOMAD 激光掃描視網膜投影器 [29]、日本兄弟公司的 Airscouter 視網膜掃描頭盔2)以及近期進入市場的 Avegant 公司的 Glyph 視網膜投影顯示頭盔3).
視網膜投影顯示技術的局限性在于, Maxwell 觀察法的匯聚點需要落在用戶的瞳孔上, 這需要比較精準的佩戴. 用戶在觀看過程中的眼球轉動也可能導致無法觀察到圖像的情況. 針對這一點, Takahashi等 [30] 對 Maxwell 觀察法進行改進, 使匯聚點的位置不落在瞳孔中心, 而是落在眼球轉動中心的位置,使得眼鏡在轉動過程中依然能看見畫面. 對于類似于 Kim 以及 Takahashi 提出的具有多個匯聚點以實現真實立體感的視網膜投影顯示或者視網膜掃描顯示系統, 則需要保證全部或者足夠多個匯聚點同時落在用戶瞳孔上.
一般聲明演示:本文由quanxiquan.cn于2022-11-18 09:06:47發表在全息圈,如有疑問,請聯系我們。
本文鏈接:http://www.dpxcxx.org/industry/vr/721.html
光場頭盔顯示技術怎么樣 光場頭盔
什么是單眼視覺的頭盔顯示技術
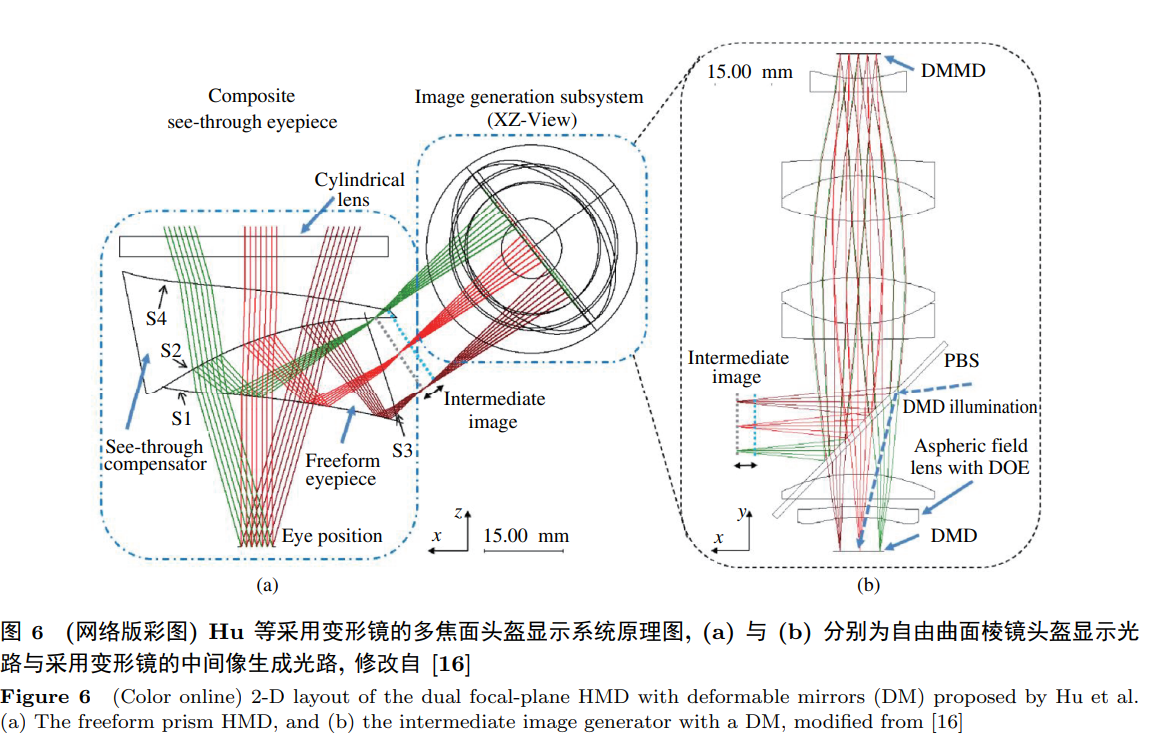
虛擬顯示光學顯示技術-多焦面頭盔
虛擬顯示光學顯示技術-大視場高分
什么是目鏡式頭盔顯示系統 目鏡式

什么是頭盔式虛擬現實顯示系統

虛擬現實圖像顯示在技術上有哪些的

AR:改變與運動有關的腦震蕩的游戲規











發表評論