全息圈
VR AR MR前沿
 quanxiquan.cn
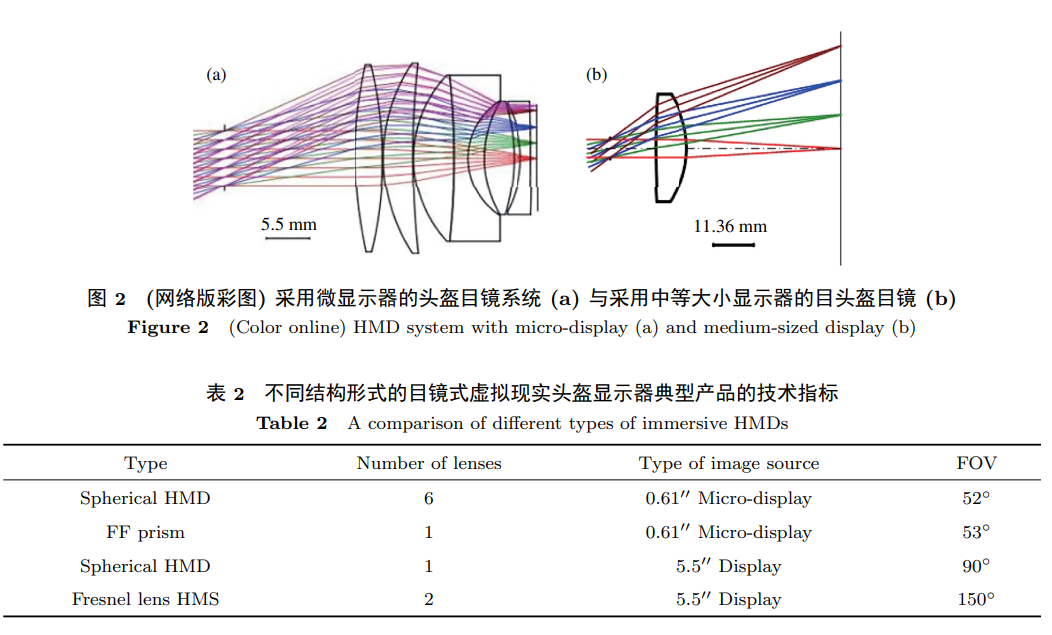
quanxiquan.cn為了提高頭盔顯示的沉浸感, 必須盡量提高其目視光學系統的視場角. 當實際應用要求頭盔顯示器的視場角進一步增大時, 采用單顯示通道的傳統設計方案會出現分辨率下降的問題, 影響到顯示的沉浸感效果. 因為視場角和分辨率存在 R = 2θ/N 的關系, 其中 R 為最小可分辨角度, θ 為半視場角,N 為頭盔中使用的微型顯示器在這個方向上的像素數. 在 N 為一定值時, R 與 FOV 相互制約, 無法同時滿足大視場和高分辨率的要求. 因此, 研制高分辨率大視場頭盔顯示器必須采用新的解決方法.獲得大視場高分辨頭盔的途徑有 3 條, 其一是提高顯示器的分辨率 (總像素數), 這要求顯示器在不改變尺寸的情況下其像元的尺寸減小. 另外兩條途徑通過光學手段實現大視場高分辨率: 利用人眼視覺特性, 合理分配顯示內容; 通過光學拼接的方式, 將多個具有較小視場角的顯示通道合成后獲得大視場.
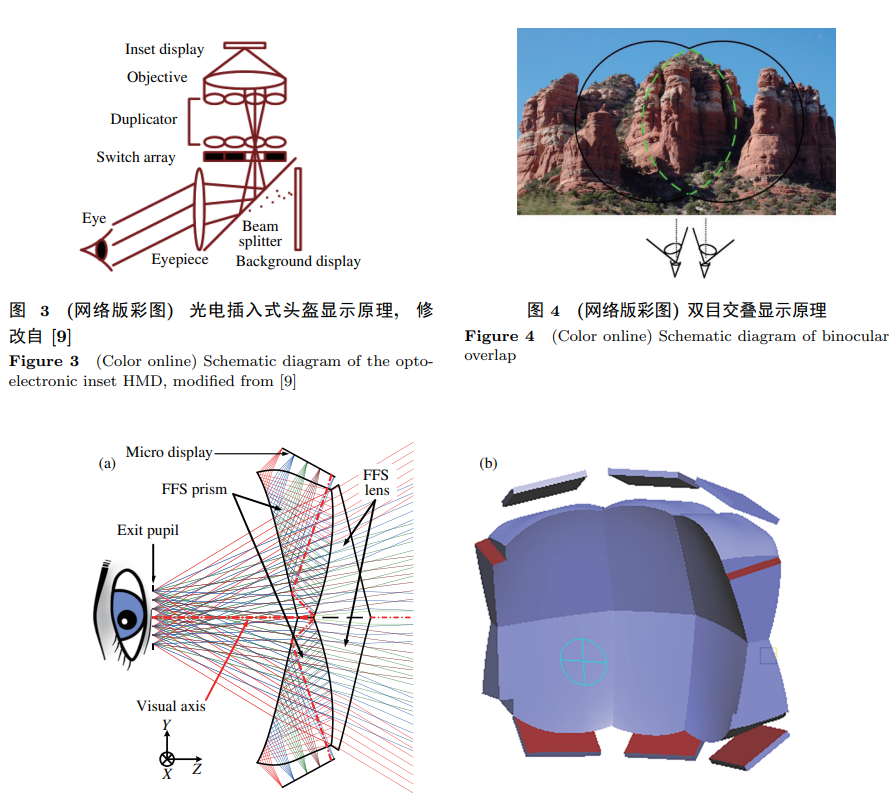
利用人眼視覺特性的方法具體可以分成 3 種實現方式. 第一種利用人眼小凹成像的特性, 僅對關注區域進行高清化顯示. 這種方法在大視場范圍內顯示一幅低分辨率的背景圖像, 同時對用戶眼部進行跟蹤獲知用戶關注區域, 將另一幅小視場的高清圖像重疊在該位置. 這種方法缺點在于需要高精度、快速的眼球跟蹤裝置, 結構也比較復雜. Rolland 等 [9] 提出靜態光電插入式頭盔顯示原型. 如圖 3 所示, 該系統利用微透鏡陣列將高分辨率圖像復制成圖像陣列, 再利用光學開關陣列選通, 將與用戶觀察位置對應的圖像單元疊加在背景圖像上. 雙目分視技術是另一種利用人眼視覺融合特性的方法. 圖 4為這種方法的示意圖, 用戶的一只眼睛觀察大視場低分辨率圖像, 另一只眼觀察中心區域小視場高分辨率圖像. 該方案成本低廉, 但是用戶只能觀察到中心區域的高清晰圖像, 且無法產生立體效果. 美國Kaiser Electro-Optics (KEO) 公司推出相關產品1). 雙目交疊技術使得左右眼觀察到的視場僅僅只有中心一部分重合, 從而在不損失分辨率也不增加頭盔復雜程度的條件下增大水平方向的總視場. 但是這種方法要求低畸變的光學系統, 設計裝調難度較大, 同時可能造成用戶合像困難、視覺疲勞等問題.
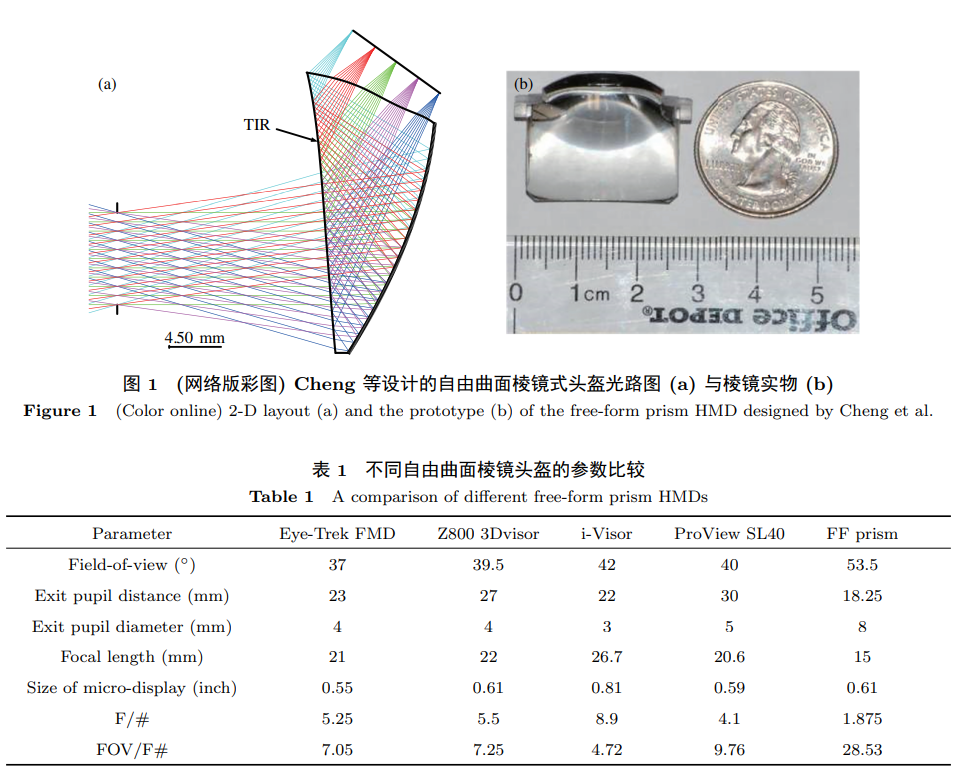
光學拼接將一系列 (N 個) 小視場、高分辨率的顯示單元按特定的方式排列安裝在一起, 在相接的區域采取部分視場重疊的方式消除縫隙. 拼接式頭盔顯示器將視場擴大到近乎原來單個模塊的 N倍, 并且在整個視場內的角分辨率與單個模塊時相同. 對于視場和分辨率之間的矛盾, 這是一個完全解決方案, 可以實現真正意義上的高分辨率大視場頭盔顯示器, 非常適用于沉浸式的虛擬現實環境. 但是該技術需要多個顯示通道, 結構復雜, 拼接裝調相對困難. Song[10] 通過雙通道目鏡的拼接獲得了全視場 66?× 32? 的頭盔顯示系統. 由于兩個通道的光軸不重合, 梯形畸變難以避免. 除此之外, 傳統旋轉對稱目鏡系統的光學拼接還會造成有效出瞳距和有效出瞳直徑的減小以及存在視點畸變等問題. 然而, 這些缺陷在自由曲面光學拼接中可以得到校正. 由于自由曲面的非對稱特性以及高自由度, 在設圖 5 (網絡版彩圖) 自由曲面棱鏡拼接式大視場高分辨率頭盔顯示系統: (a) 為兩面拼接實現 56?× 45? 的大視場,在虛擬現實應用中并不需要右側的自由曲面補償透鏡; (b) 為 6 片拼接以實現 119?× 56? 的大視場角 [11]Figure 5 (Color online) Optical tiling of free-form prism HMD (a) and the scheme of achieving a FOV of 119?× 56? with6 prisms (b)
計各個自由曲面子通道的時候可以讓其光軸與人眼視軸重合, 從而消除視點畸變與梯形畸變. 通過控制表面面型可以保證系統的有效出瞳距與出瞳直徑. Cheng 等 [11] 提出了雙自由曲面棱鏡拼接式的頭盔顯示設備, 獲得 56?× 45? 的大視場與 3.2 角分的角分辨率, 參見圖 5. 同時, Cheng 等 [11] 還提出其他的自由曲面棱鏡拼接形式, 其中六塊棱鏡拼接可以獲得 119?× 56? 的大視場角, 同時角分辨率保持為 3.2 arcmin.
王涌天, 程德文, 許晨. 虛擬現實光學顯示技術. 中國科學: 信息科學, 2016, 46: 1694–1710, doi: 10.1360/N112016-00247
一般聲明演示:本文由quanxiquan.cn于2022-11-03 16:44:02發表在全息圈,如有疑問,請聯系我們。
本文鏈接:http://www.dpxcxx.org/industry/vr/717.html
光場頭盔顯示技術怎么樣 光場頭盔
視網膜投影技術與視網膜掃描顯示技
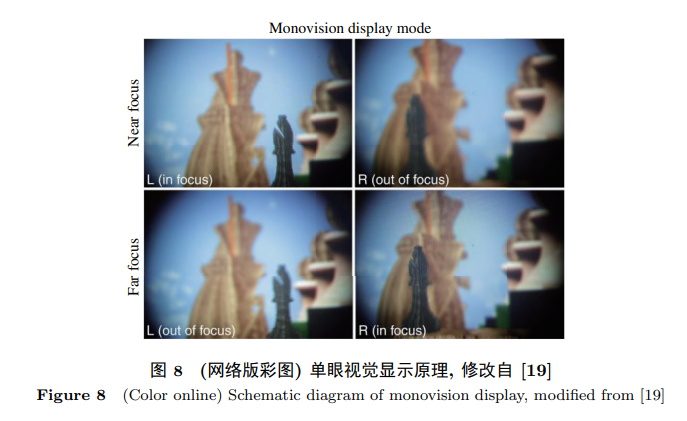
什么是單眼視覺的頭盔顯示技術
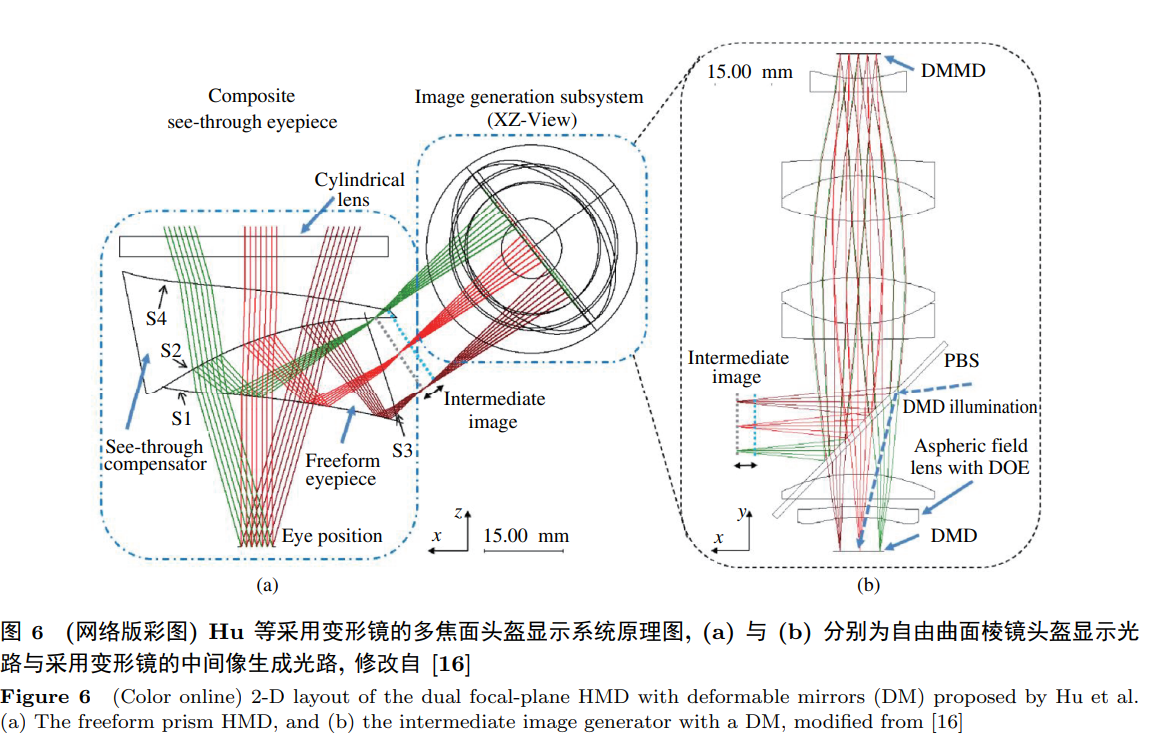
虛擬顯示光學顯示技術-多焦面頭盔
什么是目鏡式頭盔顯示系統 目鏡式

什么是頭盔式虛擬現實顯示系統

虛擬現實圖像顯示在技術上有哪些的

AR:改變與運動有關的腦震蕩的游戲規











發表評論